DETERMINATION OF THE DYNAMIC GAUGES FOR PERSONAL MOBILITY DEVICES
DETERMINATION OF THE DYNAMIC GAUGES FOR PERSONAL MOBILITY DEVICES

Abstract
In the context of the rapid growth in the use of personal mobility devices (PMDs) in urban environments, issues relating to their road safety and the adaptation of street infrastructure are becoming particularly relevant. This article presents the results of field experiments aimed at determining the dynamic corridor required for the comfortable and safe movement of PMDs. The tests were carried out on two types of road surface (asphalt concrete and cement-concrete paving slabs), both with and without contrasting road markings, at a speed of approximately 30 km/h. The methodology involved recording the electric scooter’s trajectory, followed by statistical analysis of the data and the determination of the 85% confidence interval for deviations from the centreline. It was found that the dynamic gauges for a user of average skill level are 0,98 m on a section without road markings and decreases to 0,87 m where a visually marked trajectory is present, which complies with the requirements of regulatory documents. The obtained results confirm the feasibility of shared use of cycle lanes and personal mobility devices, and also demonstrate the significant influence of high-quality road markings on the stability of the trajectory. The research findings can be used to update the regulatory framework and to design safe infrastructure for personal mobility devices.
1. Введение
В последние годы в урбанизированных пространствах наблюдается устойчивая тенденция к росту популярности транспортных средств индивидуальной мобильности (СИМ) в качестве альтернативного способа перемещения , . Данный феномен обусловлен совокупностью факторов, включая растущую транспортную нагрузку на магистрали, развитие концепций «умного города» и «зелёной мобильности».
Согласно действующей нормативно-правовой базе, под СИМ понимаются колесные транспортные средства, оснащенные электродвигателем и предназначенные для индивидуального передвижения одного пользователя . К данной категории относятся электросамокаты, гироскутеры, моноколеса, сигвеи и электроскейтборды. Их распространение формирует новый сегмент городского транспорта, часто объединяемый термином «микромобильность».
Качественным индикатором проникновения данной технологии служит рынок краткосрочной аренды (каршеринга) СИМ. Статистические данные, представленные ведущими аналитическими агентствами, демонстрируют экспоненциальный рост данного сегмента. За период с 2021 по 2024 год парк каршеринговых СИМ в Российской Федерации увеличился более чем в два с половиной раза (табл. 1) .
Динамика роста парка каршеринговых СИМ в РФ (2021–2024 гг.)
Год | 2021 | 2022 | 2023 | 2024 |
Количество СИМ, тыс. | 110 | 192 | 332 | 401 |
Подобная динамика свидетельствует не только о коммерческом успехе сервисов, но и о глубокой интеграции СИМ в повседневные практики мобильности городского населения.
В условиях сложившейся городской инфраструктуры пользователи СИМ вынуждены использовать разнородные пути движения. К ним относятся проезжая часть (в общем потоке автотранспорта или у края), тротуары и пешеходные зоны, элементы велоинфраструктуры (при их наличии).
Стремительная популяризация СИМ в условиях недостаточно адаптированной нормативной базы и городской инфраструктуры порождает комплекс проблем, связанных с организацией безопасного движения и распределением транспортных потоков , . Решение этих проблем требует междисциплинарного подхода на стыке градостроительства, транспортного планирования, правового регулирования и социальных исследований. Данная ситуация формирует зоны потенциального пространственно-временного конфликта между различными участниками дорожного движения. Несмотря на то, что правовой статус и правила использования СИМ регламентированы разделом 24 Правил дорожного движения Российской Федерации, их соблюдение значительной частью пользователей остается неудовлетворительным. Это приводит к росту числа аварийных ситуаций и дорожно-транспортных происшествий (ДТП) с участием данной категории участников движения (табл. 2) .
Количество ДТП с участием пользователей СИМ в РФ (2021–2024 гг.)
Год | 2021 | 2022 | 2023 | 2024 |
Количество ДТП, шт. | 672 | 941 | 3100 | 4426 |
Согласно данной статистике, наблюдается устойчивый рост числа ДТП с участием пользователей СИМ.
На рисунках 1 и 2 представлены обобщённые данные роста парка каршеринговых СИМ и ДТП с их участием.
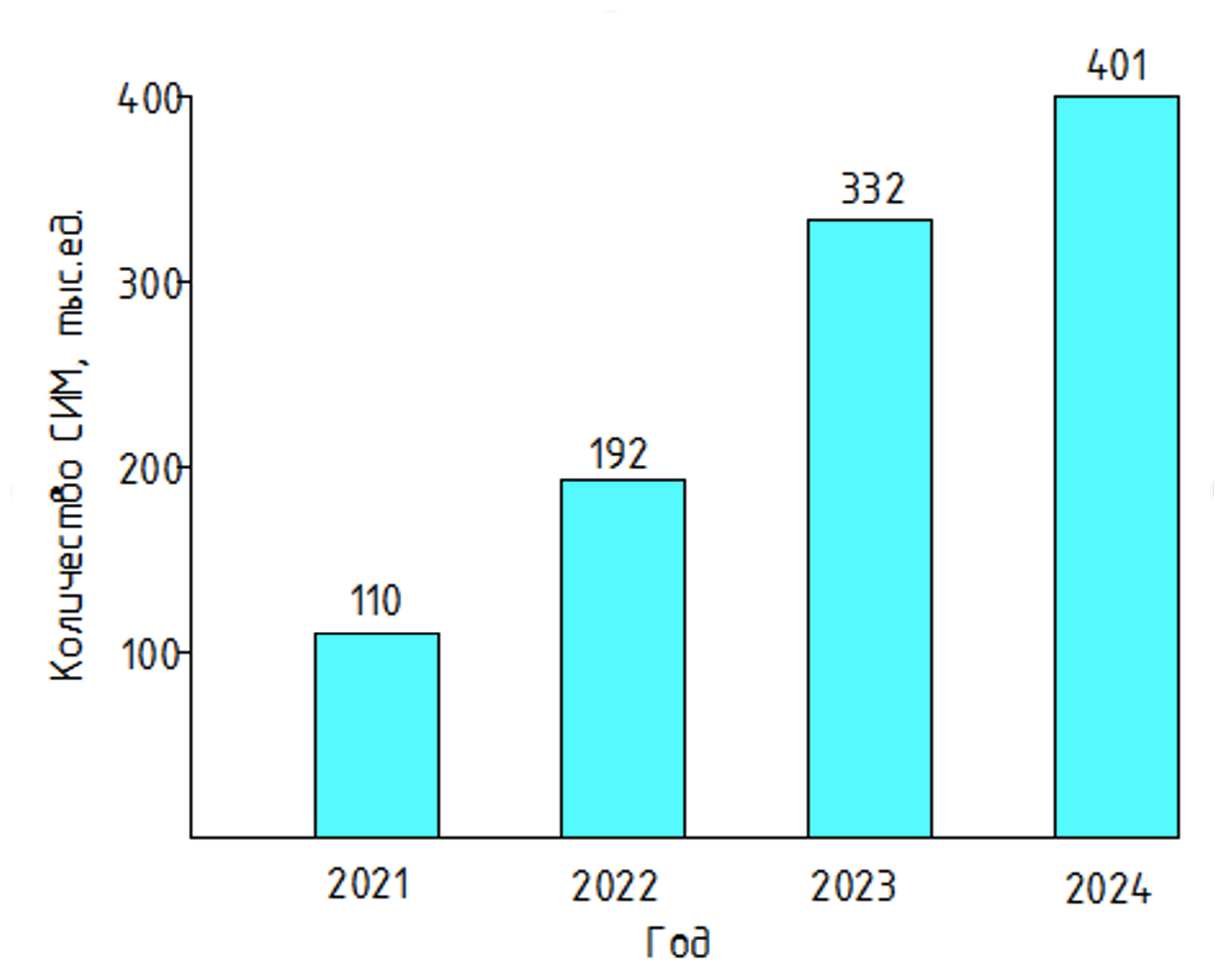
Динамика роста парка каршеринговых СИМ
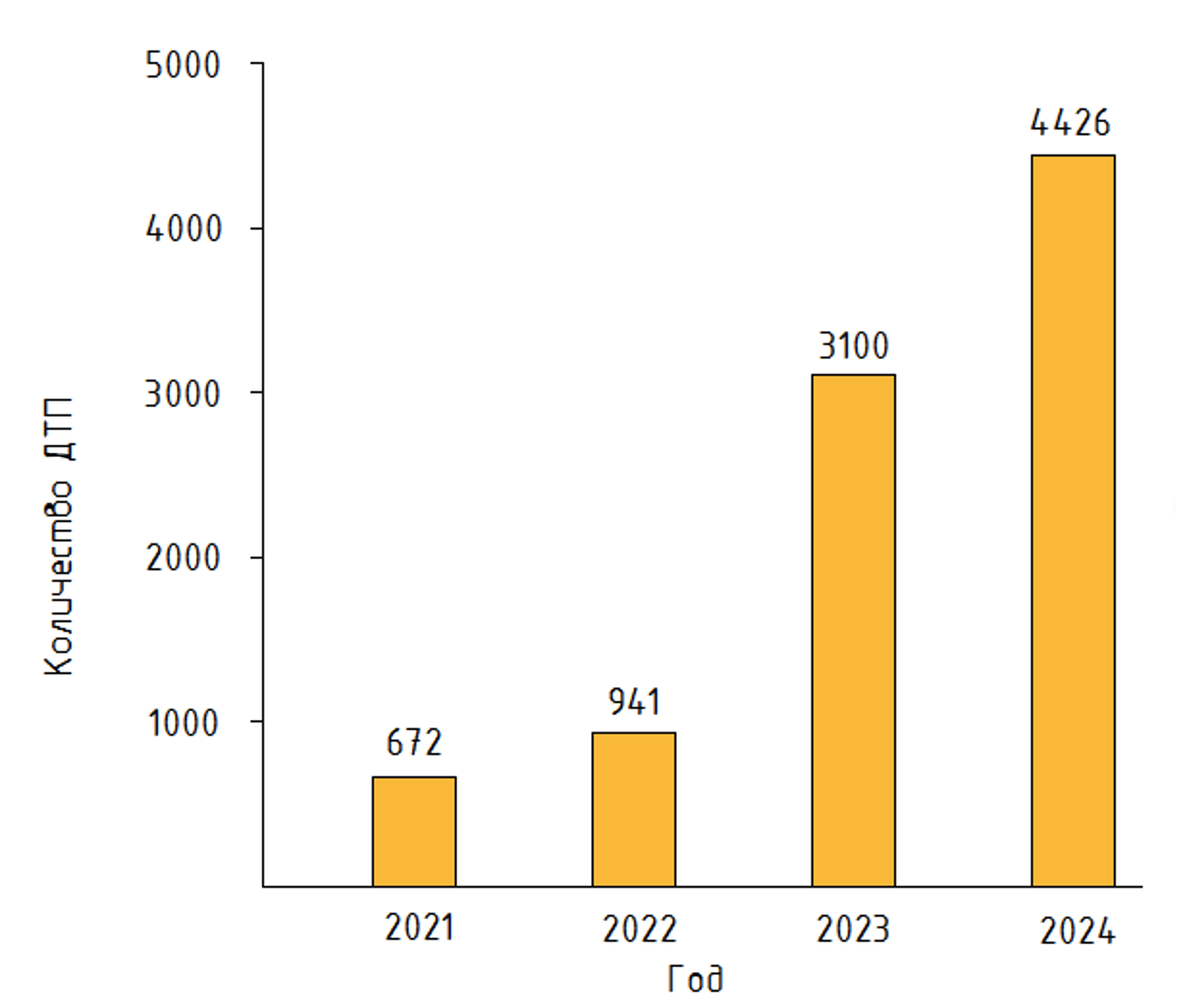
Рост ДТП с участием пользователей СИМ
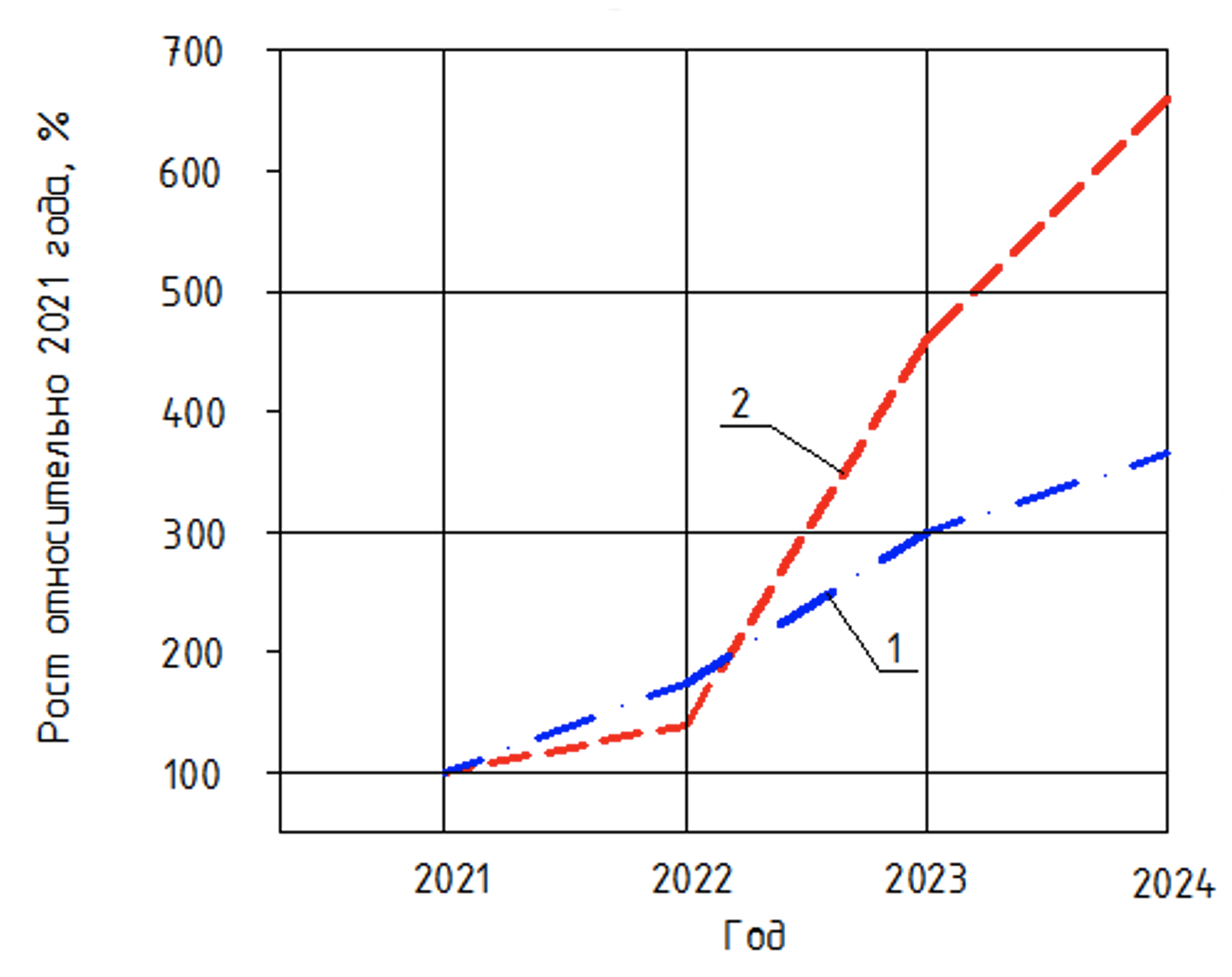
Корреляция роста СИМ и аварийности
1 – рост парка СИМ; 2 – рост ДТП
Значимым шагом в направлении адаптации инфраструктуры стало принятие поправки № 3 в СП 396.1325800.2018 «Улицы и дороги населенных пунктов. Правила градостроительного проектирования» (в редакции от 26.12.2024), которая законодательно закрепила возможность использования велосипедных дорожек и полос для движения СИМ, объединив их под общим термином «велокоммуникации» .
Анализ открытых источников, а также результаты направленных авторами запросов в профильные научно-исследовательские организации, разрабатывающие нормативную базу в сфере транспортного планирования, не выявили публичных сведений о проведенных фундаментальных или прикладных исследованиях, обосновывающих данную поправку. В частности, отсутствуют данные о детальном изучении траекторий движения, динамических коридоров, устойчивости и поведения различных типов СИМ в условиях совместного использования инфраструктуры с велосипедами.
2. Проведение испытаний
Для подтверждения возможности использования велодорожек в качестве путей передвижения СИМ авторами статьи проведены натурные исследования по определению динамического коридора при движении электросамоката, как одного из вида СИМ, на прямолинейном участке.
В качестве объекта исследования был выбран электросамокат, представляющий наиболее массовый сегмент каршеринговых СИМ.
Натурные испытания проводились на базе модели электросамоката Kugoo M4, технические характеристики которой репрезентативны для сегмента каршеринга (табл. 3).
Сравнительные технические характеристики исследуемых моделей электросамокатов
Наименование | Сравниваемые характеристики | |||
Внешние размеры, мм | Вес, кг | Размер шин, дюймы | Пробег, км | |
Kugoo M4 | 1190х610х1190 | 23 | 10 | До 35 |
Ninebot S90L | 1196х556х1219 | 30 | 10,5 | До 50 |
Сравнительный анализ с одной из наиболее распространенных в России каршеринговых моделей Ninebot S90L подтверждает сопоставимость габаритных и массовых параметров, что позволяет экстраполировать результаты исследования на значительную часть парка СИМ.
Для нивелирования влияния субъективного фактора была введена трехуровневая классификация пользователей по степени водительского опыта:
– начальный уровень: эпизодическое использование электросамоката (несколько раз в месяц);
– средний уровень: регулярные поездки на небольшие расстояния (один-два раза в неделю);
– высокий уровень: систематическое использование СИМ (чаще трех раз в неделю).
Для реализации первого этапа экспериментальных исследований был определён опытный участок, отвечающий следующим параметрам:
– тип сооружения: тротуар;
– геометрические параметры: ширина 2,1 м, протяжённость 100 п.м;
– план и продольный профиль: прямолинейный в плане с нулевым продольным уклоном (i = 0‰);
– конструкция и состояние покрытия: асфальтобетонное покрытие, соответствующее требованиям к хорошему эксплуатационному состоянию (отсутствие ям, просадок, волн, шелушения);
– разметка и помехи: горизонтальная разметка на поверхности покрытия отсутствовала, помехи от пешеходов и иных движущихся СИМ были исключены.
Испытания проводились при благоприятных метеорологических условиях: хорошая видимость, сухое покрытие. В качестве оператора выступал пользователь, предварительно отнесённый к категории со средним уровнем водительского навыка. Целевая скорость движения в ходе эксперимента поддерживалась на уровне, приближенном к 30 км/ч. После разгона СИМ и выхода на целевую скорость необходимый отрезок опытного участка был пройден за 14 секунд.
В результате протоколирования зафиксирована траектория движения электросамоката, представляющая собой ломаную линию с систематическими отклонениями от заданной прямолинейной оси как в левую, так и в правую сторону. Используемая измерительная методика и инструментарий обеспечили точность фиксации величины отклонения в плане с погрешностью, не превышающей ±0,5 см.
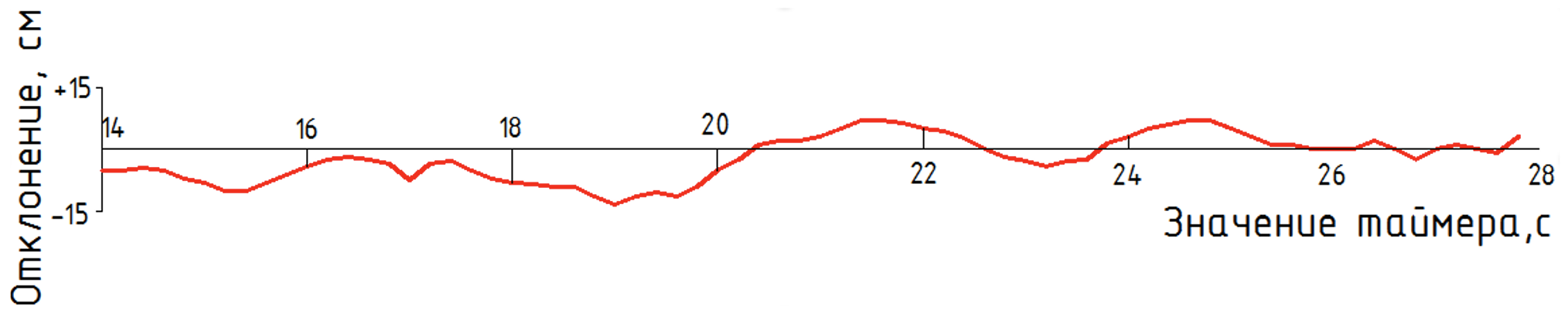
Для последующего углублённого анализа и обеспечения воспроизводимости результатов из серии идентичных заездов был выбран наиболее репрезентативный эксперимент, характеризующийся максимальным размахом колебаний (амплитудой) значений. Критерием отбора послужила максимальная разность между экстремальными значениями отклонений от планируемой оси движения, которая составила: +7,0 см (максимальное отклонение влево) и -13,5 см (максимальное отклонение вправо). Суммарный размах траектории таким образом достиг 20,5 см. Фактическая траектория движения, полученная в выбранном эксперименте, представлена на рисунке 4. По оси абсцисс отложен временной ряд — значения таймера в секундах, по оси ординат — соответствующие им мгновенные значения отклонения от оси движения, выраженные в сантиметрах.
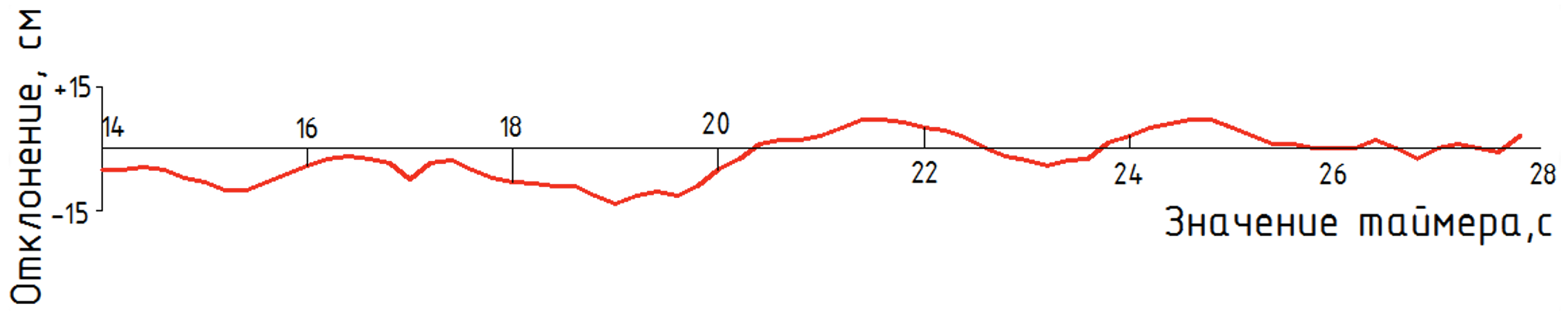
Фактическая траектория движения электросамоката (эксперимент № 1)
Для минимизации влияния экстремальных выбросов, искажающих картину типичного поведения системы, был применен специальный метод обработки данных, включающий следующие этапы:
– устранение знаковой асимметрии: для перехода к анализу абсолютных величин отклонений и устранения разнонаправленности (влево/вправо) виртуальная ось планируемой траектории была смещена на величину максимального зафиксированного отклонения вправо, составлявшую 13,5 см. В результате все экспериментальные точки получили положительное значение относительного смещения от новой базовой линии;
– полученные абсолютные значения отклонений были округлены до целых сантиметров и упорядочены по возрастанию;
– для каждого дискретного значения отклонения (X) были рассчитаны: относительная частота (доля), выраженная в процентах (%), накопленная (кумулятивная) частота, также в процентах.
Результаты данной обработки для эксперимента № 1 представлены в таблице 4.
Эмпирическое распределение абсолютных отклонений от оси движения (эксперимент № 1)
Значение отклонения | Доля, % | Накопленным итогом, % |
1 | 1,43 | 1,4 |
2 | 0 | 1,4 |
3 | 4,29 | 5,7 |
4 | 4,29 | 10,0 |
5 | 4,29 | 14,3 |
6 | 5,71 | 20,0 |
7 | 4,29 | 24,3 |
8 | 1,43 | 25,7 |
9 | 7,14 | 32,9 |
10 | 4,29 | 37,2 |
11 | 7,14 | 44,3 |
12 | 10,0 | 54,3 |
13 | 1,43 | 55,7 |
14 | 10,0 | 65,7 |
15 | 5,71 | 71,4 |
16 | 5,71 | 77,2 |
17 | 7,14 | 84,3 |
18 | 0 | 84,3 |
19 | 7,14 | 91,4 |
20 | 1,43 | 92,9 |
21 | 7,14 | 100,0 |
Данное распределение послужило основой для определения статистически значимого параметра динамического габарита, соответствующего заданному уровню обеспеченности.
На основании эмпирического распределения, представленного в таблице 4, было выполнено графическое моделирование кумулятивной функции распределения (рис. 5).
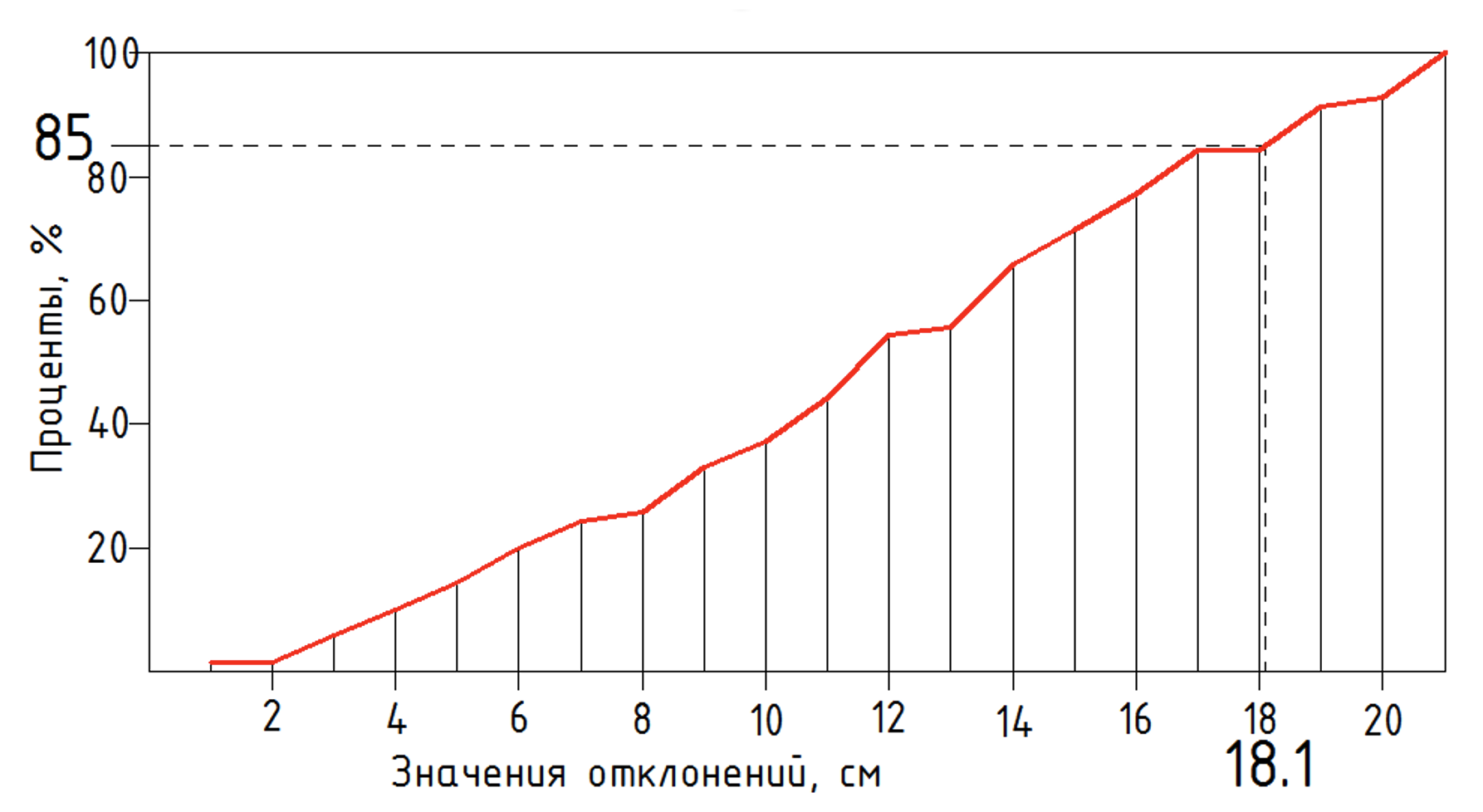
Значения отклонений и их процентное содержание в эксперименте № 1
Анализ графика (рис. 5) позволил установить, что величина отклонения от заданной прямолинейной траектории, соответствующая 85%-ной обеспеченности, составляет 18,1 см. В практических расчетах для обеспечения запаса надежности данное значение было округлено до 18 см.
Таким образом, для условий свободного движения по прямолинейному участку асфальтобетонного покрытия без разметки и внешних помех, при управлении оператором среднего уровня подготовки и скорости около 30 км/ч, статистически значимая ширина динамического коридора, необходимая для учета типичных колебаний траектории, составляет 0,18 м.
С целью верификации гипотезы о влиянии визуальных ориентиров на стабильность траектории был организован и проведен второй натурный эксперимент.
Участок для эксперимента № 2 обладал следующими характеристиками: геометрические параметры — протяженность 100 п.м., ширина 3,0 м. Покрытие выполнено из мелкоштучной цементобетонной плитки, уложенной с формированием геометрического рисунка за счет использования плиток двух контрастных цветов (серый и желтый). В центральной части ширины участка была нанесена сплошная продольная полоса белого цвета шириной 0,30 м, четко обозначающая рекомендуемую ось движения для электросамоката. Данное решение обеспечивало двойной контрастный эффект: как между полосой и плиткой, так и между разными цветами самого плиточного покрытия.
Использование цементобетонной плитки и отсутствие продольных швов, совпадающих с направлением движения, обеспечили равномерные и стабильные условия сцепления колеса с покрытием по всей ширине исследуемой полосы.
Условия проведения испытаний (метеоусловия, уровень подготовки оператора, целевая скорость ~30 км/ч) были идентичны параметрам эксперимента № 1. Время преодоления отрезка опытного участка составило так же 14 секунд.
Фиксация траектории движения подтвердила, что характер движения сохраняется (ломаная линия с отклонениями), однако амплитуда колебаний относительно заданной оси визуально уменьшилась. Анализ первичных данных показал, что максимальные отклонения в выбранном для обработки (наиболее репрезентативном) заезде составили:
– максимальное отклонение влево: +3,0 см
– максимальное отклонение вправо: -8,0 см
Суммарный размах траектории сократился до 11,0 см, что составляет примерно 54% от размаха, зафиксированного в эксперименте № 1, на участке без разметки (20,5 см).
Фактическая траектория движения электросамоката, полученная в ходе эксперимента № 2, представлена на рисунке 6. Способ визуализации идентичен рисунку 4, по оси абсцисс отложен временной ряд — значения таймера в секундах, по оси ординат — соответствующие им мгновенные значения отклонения от оси движения, выраженные в сантиметрах.
Фактическая траектория движения электросамоката (эксперимент № 1)
Аналогично данным эксперимента №1, проверка на соответствие нормальному распределению для массива значений отклонений, полученных на втором опытном участке, дала отрицательный результат. Следовательно, для обработки был применен аналогичный непараметрический метод, исключающий влияние выбросов и опирающийся на построение эмпирической функции распределения. Обработанные данные были визуализированы в виде графика кумулятивного распределения (рис. 7).
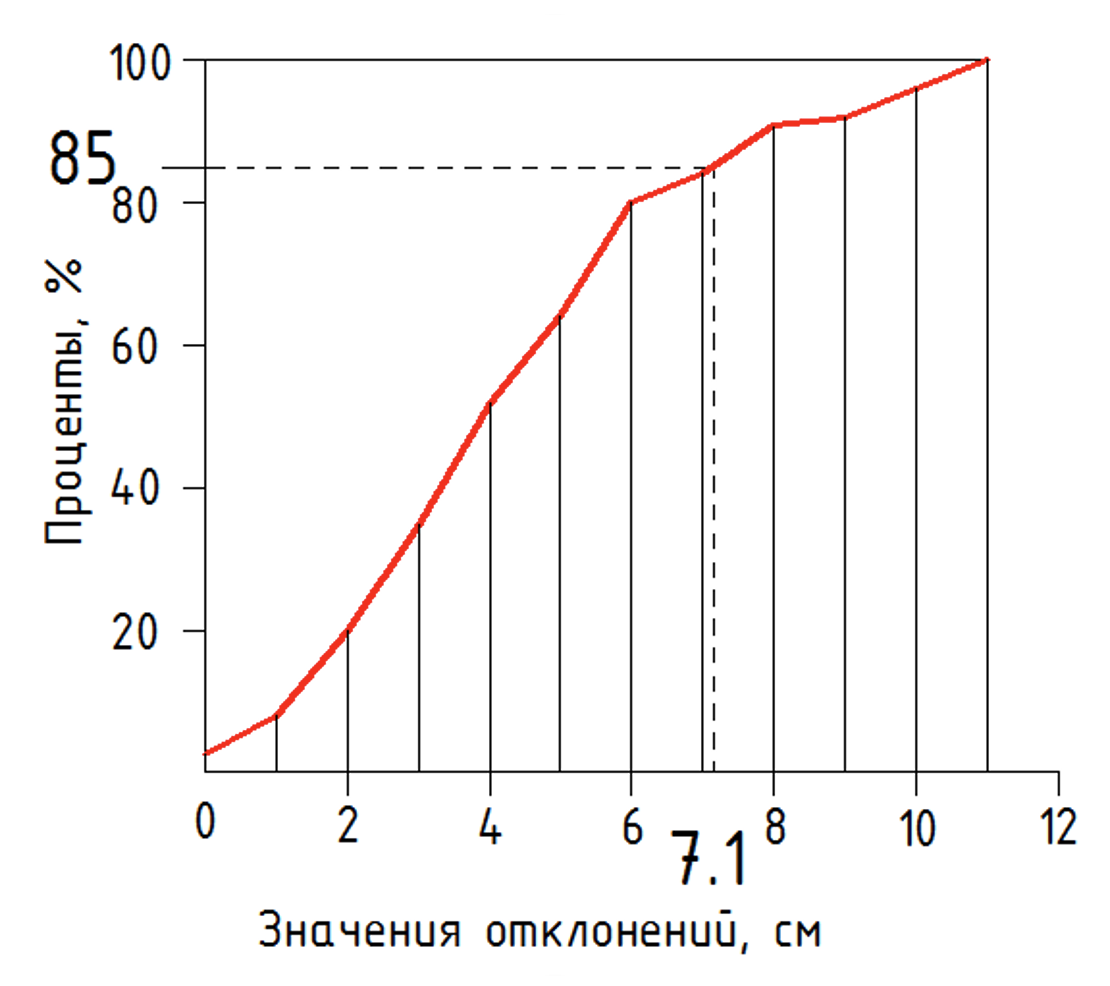
Значения отклонений и их процентное содержание в эксперименте № 2
Анализ графика кумулятивного распределения (рис. 7) позволил установить, что для условий эксперимента № 2 величина отклонения от оси, заданной визуальной разметкой, соответствующая данному уровню обеспеченности, составляет 7,1 см.
Для практического использования в расчетах данное значение было округлено до 7 см. Таким образом, при движении по прямолинейному участку с плиточным покрытием, оборудованному контрастной визуальной разметкой, статистически значимая ширина динамического коридора для оператора среднего уровня подготовки составляет 0,07 м. Сравнение с результатом эксперимента № 1 (0,18 м) демонстрирует снижение расчетной величины динамического коридора более чем в 2,5 раза, что свидетельствует о существенном стабилизирующем влиянии качественной визуальной организации пути движения.
Максимальная ширина средства индивидуальной мобильности в статическом положении определяется конструктивными параметрами, в первую очередь — шириной рулевой стойки. Однако в процессе управления оператор занимает позу, при которой локтевые суставы, как правило, выходят за проекцию руля в горизонтальной плоскости. Для количественной оценки данного фактора были выполнены инструментальные замеры. Установлено, что общий габарит, занимаемый оператором на электросамокате, составляет в среднем 0,80 м, с возможными вариациями в зависимости от антропометрических данных и индивидуальной манеры управления. Следует отметить, что полученное значение является первичной оценочной величиной и требует дальнейшей верификации на расширенной выборке пользователей.
3. Результаты испытаний
Интегрируя результаты натурных экспериментов, общая ширина полосы, необходимая для безопасного и комфортного движения (динамический габарит, Bd), может быть определена как сумма статического габарита оператора с устройством (Bs) и статистически значимой величины поперечных колебаний траектории (Δ), установленной с обеспеченностью 85%:
Bd = Bs + Δ
Подставив полученные экспериментальные значения, получаем:
Для условий отсутствия визуальной разметки (Эксперимент № 1): Bd1 = 0,80 м + 0,18 м = 0,98 м
Для условий наличия контрастной визуальной разметки (Эксперимент № 2): Bd2 = 0,80 м + 0,07 м = 0,87 м.
4. Заключение
Согласно актуализированной редакции СП 396.1325800.2018 (таблица 9.2), минимальная ширина полосы движения для велокоммуникаций составляет 1,0 м, а рекомендуемая — 1,5 м . Полученные расчетные значения динамического габарита (0,87–0,98 м) укладываются в указанный нормативный диапазон, что является формальным подтверждением возможности размещения СИМ на существующих велополосах в условиях свободного (без помех) движения.
Наличие контрастной визуальной разметки, четко обозначающей рекомендуемую траекторию движения, оказывает статистически значимое стабилизирующее влияние на оператора. В условиях эксперимента это проявилось в снижении расчетной составляющей динамического габарита, обусловленной колебаниями траектории, более чем в 2,5 раза (с 0,18 м до 0,07 м). Данный факт свидетельствует о высокой эффективности качественного обустройства разметки траектории движения СИМ на поверхности велокоммуникаций как меры по повышению безопасности и пропускной способности.
Таким образом, результаты проведенных натурных экспериментов позволяют эмпирически подтвердить достаточность минимальной нормативной ширины полосы велокоммуникаций (1,0 м по СП 396) для обеспечения движения СИМ, управляемого оператором среднего уровня подготовки, в условиях отсутствия встречных или попутных помех.
Приоритетным направлением дальнейших исследований будет являться проведение натурных экспериментов на более сложных участках движения СИМ, имеющих наибольшую аварийную опасность. Данными участками могут быть пересечения и примыкания велокоммуникаций с автомобильными дорогами, с тротуаром (с интенсивным пешеходным движением), зоны с ограниченной видимостью, движение в темное время суток, а также движения группы СИМ.
При проведении дальнейших экспериментов определения статического габарита оператора с устройством необходимо учитывать защитную экипировку водителя СИМ, включающую в себя: защиту головы, защиту тела, защиту рук и ног. Данная экипировка может оказывать «эффект дискомфорта» и тем самым непроизвольно заставлять водителя СИМ сильнее разводить локтевые суставы в стороны и увеличивать свои габариты. Также рекомендуется проведение дополнительных замеров статического габарита оператора с устройством на расширенной выборке пользователей с различными типами экипировки.